github仓库
前言
Linear Quadratic Gaussian
在实际系统中,噪声是不可避免的,在噪声的影响下,系统状态方程可以写作
{X˙=AX+Bu+Gwy=CX+Du+Hw+v
其中 w,v 均被当作为白噪声
如果我们假设噪声是均值为0高斯分布(事实上很多时候确实近似服从高斯分布,想想为什么呢?)由于系统噪声和输出噪声的存在,状态不能完美的衰减为0。我们就希望优化损失函数的期望,即
J=E{T→∞limT1∫0T[XTQX+UTRU]dt}
LQG 控制器实际上就是一个最优二次型线性调节器+一个最优状态估计器(卡尔曼滤波器)而得到的一个控制器,即 LQR+KF
而 LQG 控制器相当于是将两个系统分离,LQR 与 KF 分离,而 LQR 是依旧是依据原系统所建立的一个控制系统,不过系统的观测值需要经过 KF 预估
KF
在 LQG 框观测器架中的卡尔曼滤波器,指的是一个最优状态观测器,这里的观测器是现代控制理论—状态空间方程中的最常见的观测器——龙伯格观测器,但是后者极点是自由配置的,并且没有考虑噪声的影响,并不是最优
对于一个系统
x˙=Ax+Bu+Gwy=Cx+Du+Hw+v
其中 w 是过程噪声, v 是观测噪声,它们被假设是符合高斯(Gauss)分布的。 G,H 是常系数矩阵,用于描述 x 中各部分受到噪声强度不一致的情况,很多地方 H 被认为是一个 0 矩阵,区别不大
假设
- 系统可观测
- 噪声符合高斯分布,且协方差矩阵为 E(wwT)=Qk,E(vvT)=Rk,E(wvT)=Nk
对于给定观测器动态和代价函数
x^˙=Ax^+Bu+L(y−Cx^−Du)y^=x^J′=t→∞limE{(x−x^)(x−x^)T}
需要寻找一个常系数矩阵使得 J′ 最小,最后得到
L=(PCT+N)R−1
其中
R=Rk+HNk+NkTHT+HQkHTN=G(QkHT+Nk)
同时 P 是以下 Riccati 方程的解,并且 P 是一个对称正定矩阵
ATP+PA−(PB+Nk)Rk−1(BTP+NkT)+Qk=0
使用得到的这个 L 的最优观测器,就是 LQG 框架使用的卡尔曼滤波器
LQG
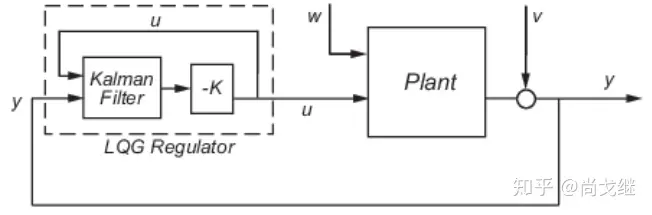
其中的 -K 就是 LQR 控制器,而 w 是过程噪声, v 是观测噪声
分离性原理
假设系统可控可观测
LQR 是一种最优的线性状态反馈, KF 是一种最优的状态估计,直接将两级串联闭环系统可以写作
[x˙x^˙]=Alqg[xx^]+Glqg[wv]y=Clqg[xx^]+Hlqg[wv]
其中
Alqg=[ALC−BFA−BF−LC]Glqg=[GLH0L]Blqg=[BB−LD]Clqg=[C0−DF0]Hlqg=[H00I]
此时引入观测器误差 δ=x−x^,可以得到
[xδ]=[II0−I][xx^]⇓[II0−I][xδ]=[xx^]Ctransform=[II0−I]
所以带入上式可以得到
[x˙δ˙]=CtransformAlqgCtransform[xδ]+CtransformGlqg[wv]y=ClqgCtransform[xδ]+Hlqg[wv]⇓[x˙δ˙]=[A−BF0BFA−LC][xδ]+CtransformBlqg[wv]⇓xa˙=Aaxa+GaWy=Caxa+HaW
由于 A−BF 和 A−LC 都是稳定的,即它们的特征值都严格小于 0,根据分块矩阵的特征值得计算规则,这个大的矩阵也是稳定的。这就意味着可以使 LQR 和 KF 级联,得到一个稳定的系统,这就是分离性原理。
例子
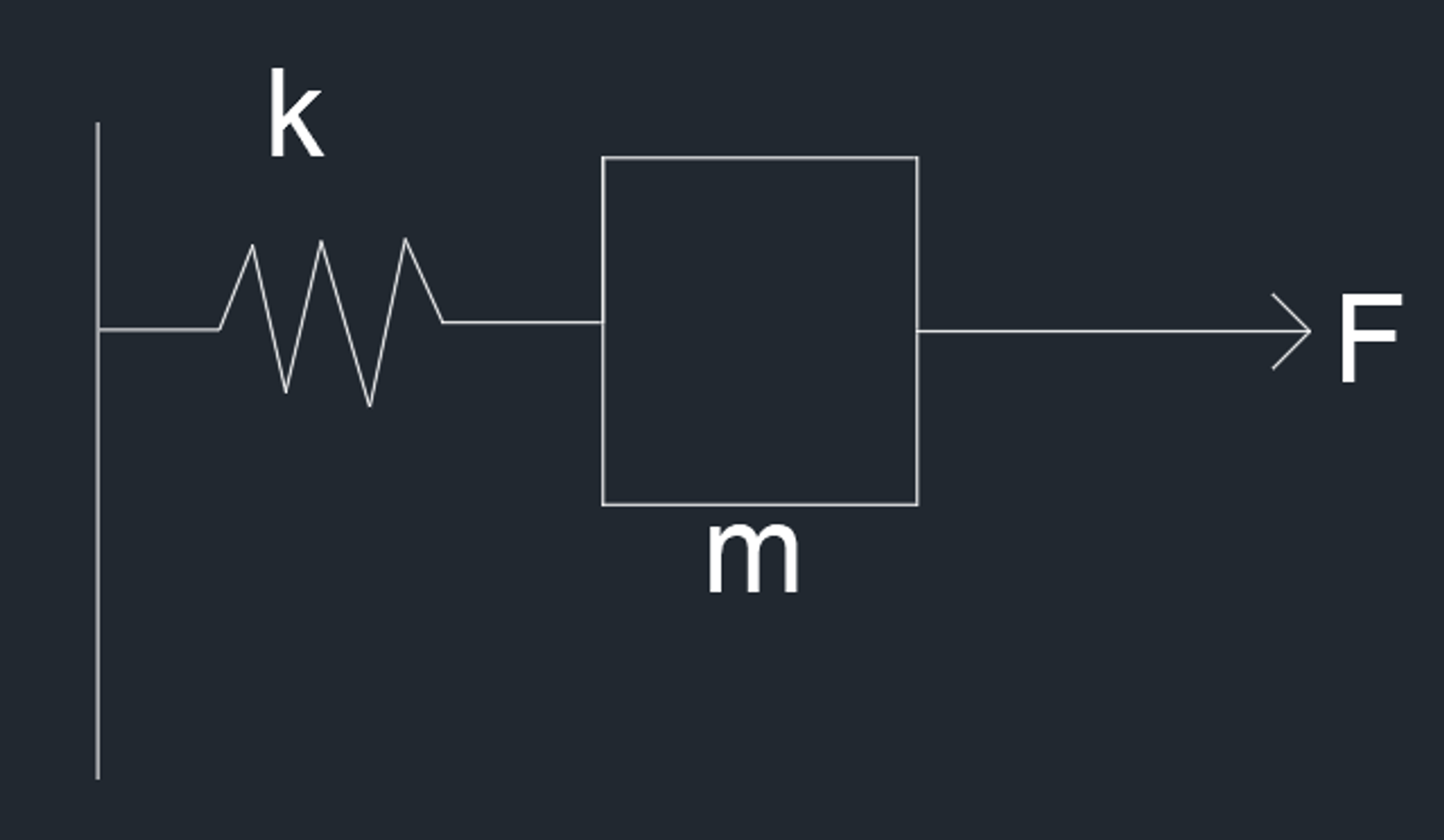
由此图列出系统状态方程
[x1˙x2˙]=[0mk10][x1x2]+[0m1]u+[11]wy=[10][x1x2]+[0]w+v
首先是建立 LQR 控制器,先不考虑噪声
[x1˙x2˙]=[0mk10][x1x2]+[0m1]uy=[10][x1x2]
根据系统代价函数
J=∫0∞[xTQx+uTRu]dt
设定相应的权重系数矩阵 Q 和 R,并且在matlab中可以直接调用函数 lqr 来获得对应的线性反馈控制器
推导过程可以查看 LQR线性二次调节器——系统输入线性化
建立 KF 滤波器
x^k∣k−1=Fkx^k−1∣k−1Pk∣k−1=FkPk−1∣k−1FkT+QkKk=Pk∣k−1HkT(HkPk∣k−1HkT+Rk)−1x^k∣k=x^k∣k−1+Kk(zk−Hkx^k∣k−1)Pk∣k=(I−KkHk)Pk∣k−1
根据公式,可以得到 x^,然后与 lqr 的线性反馈控制器作用,得到对系统的控制
关于 KF 可以看 卡尔曼滤波 KF
参考
线性二次积分控制 - MATLAB lqg - MathWorks 中国
