前言
对于一个非线性系统
x˙=f(x,u)
假设 u 是 x 的函数
u=ϕ(x)
反馈线性化
就是将传递函数 f(x,u) 中的非线性部分通过调整 ϕ(x) 来抵消,最终得到的是一个线性的关系
例子
x˙=f(x,u)=ax2+u
可以使得 u=ϕ(x)=−ax2−x,其中 −ax2 用于抵消系统的非线性量,而 −x 用于将系统保持平稳,得到
x˙=−x↓x=e−t
当 t→∞ 时, x→0
李雅普诺夫直接办法
需要选取李雅普诺夫函数来判断
例子
x˙=f(x,u)=x2−x3+u
选定
V=21x2
由于
V(0)=0V(x)>0 x=0V˙=x3−x4+xu
所以就需要设计 u 使 V˙ 负定
已知
x3:非负定−x4:负定
所以就需要选定 u 来消除 x3 ,可以选择 u=−x2−x,消除非负定项,最终得到
x˙=−x3−x
根据仿真的结果,可以看出,设计 u 时一定要慎重考虑能耗和收敛速度的平衡关系
反步法
对于一个假定的系统
x˙1=f1=x12+x2x2˙=f2=x1+u
由于控制输入并不能直接作用到目标 x1 上,所以控制时就需要控制 u→x˙2→x2→x˙1→x1,但是在设计时需要反过来设计,使之不断地满足李雅普诺夫的渐近稳定条件
步骤
-
设计一个 x2→x2d 使得 x1→x1d
引入一个误差 e=x1d−x1,并且使 e→0
需要设计一个李雅普诺夫函数 V1(e)=21e2,是个正定的函数,要想满足李雅普诺夫渐进稳定的条件,就保证导数负定就可以了
要使 V˙1(e)=ee˙ 负定,可以使 V˙1(e)=−k1e2,也就是
e˙=x˙1d−x˙1=x˙1d−(x12+x2)=−k1e
根据上述假定的系统,要使上一步实现,就需要设定 x2d,使该系统有一个这样的表现
x2d=k1e+x˙1d−x12
-
设计 u 使得 x2→x2d
引入一个误差 δ=x2d−x2,并且使 δ→0,带入到 V˙1 中得到
V˙1=−k1e2
此时设计一个李雅普诺夫函数 V2(e,δ)=V1(e)+21δ2,可知它是一个正定的函数,要想满足李雅普诺夫渐进稳定的条件,就保证导数负定就可以了,其中 x2=x2d−δ
V˙2=ee˙+δδ˙=e(x˙1d−x12−(k1e+x˙1d−x12−δ))+δδ˙=−k1e2+eδ+δδ˙↓V˙2=−k1e2+δ(e+δ˙)
所以要使之负定,就需要保证 e+δ˙=−k2δ,带入之后得到
e+(k1e˙+x¨1d−2x1(x12+x2)−x1−u)=−k2(k1e+x˙1d−x12−x2)
最终得到
u=e+k1e˙+x¨1d−2x1(x12+x2)−x1+k2(k1e+x˙1d−x12−x2)
示例
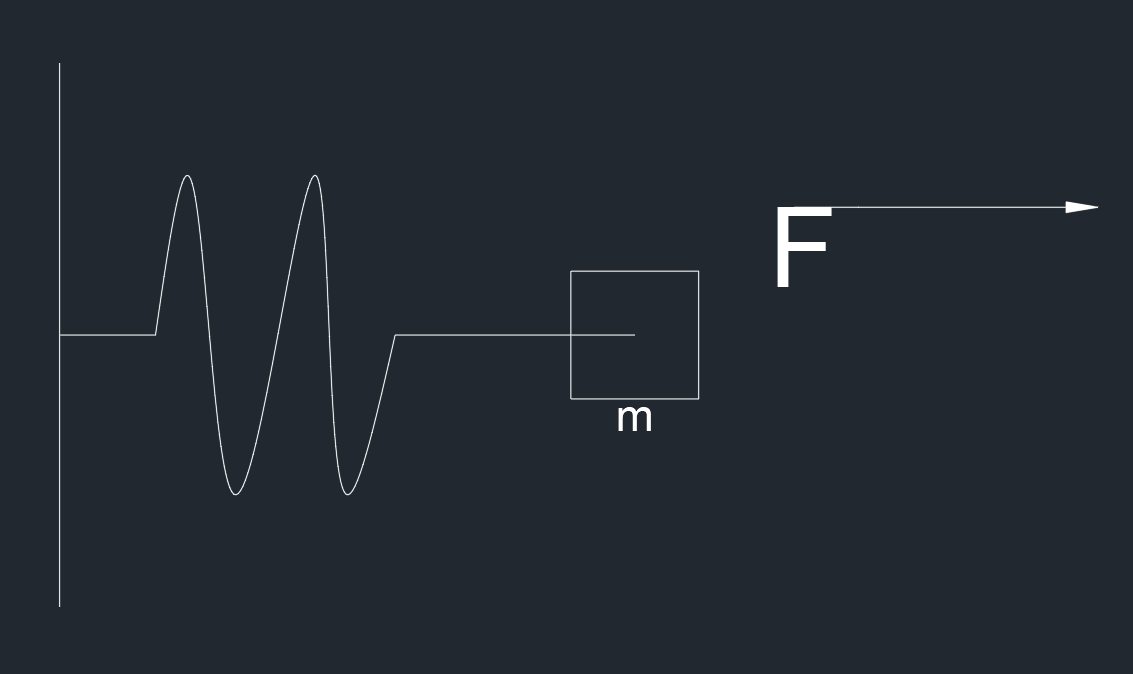
对于一个非线性弹簧滑块的系统,假设弹簧的力的与拉伸长度的关系为 F=αx3
所以该系统的状态方程为
mx¨+αx3=F
系统的输入为 F,滑块位移为 x,质量为 m
规定滑块的目标轨迹为 x1d
令
x1=xx2=x˙
所以得到
x˙1=x2 1◯x˙2=−mαx13+mu 2◯
所以可以通过控制输入来控制 x˙2 进而控制 x2,从而控制 x1
引入误差 e
e=x1d−x1 3◯
从而目标变为 e→0
求导得到
e˙=x˙1d−x˙1=x˙1d−x2 4◯
可以找到一个李雅普诺夫函数 V(e) 使之渐进稳定,从而实现目标,设
V1(e)=21e2 5◯
V1 是一个正定的函数,求导得到
V˙1=e(x˙1d−x2) 6◯⇓x˙1d−x2=−k1eV˙1=−k1e2:ND
根据上述期望,可以设置x2 的期望值
x2d=x˙1d+k1e 7◯
所以目标变为 x2→x2d,令
δ=x2d−x2 8◯
将 8 带入到 6 中,得到
V˙1=e(x˙1d−(x2d−δ))
带入 7 式
V˙1=−k1e2+eδ 9◯
由于 δ˙=x˙2d−x˙2,带入 2 式和 7 式,得
δ˙=x¨1d+k1e˙−(−mαx13+mu)
带入 4 式
δ˙=x¨1d+k1(x1d−x2)+mαx13−mu 10◯
此时就需要 δ→0,e→0,需要找到新的李雅普诺夫函数 V(e,δ) 使之满足渐进稳定的条件了
V2=V1+21δ2:PD
对上式求导得到
V˙2=V˙1+δδ˙=−k1e2+eδ+δδ˙=−k1e2+δ(e+δ˙)
为使之负定,可以设计使 e+δ˙=−k2δ,带入 10 式得
e+x¨1d+k1(x1d−x2)+mαx13−mu=−k2δ
最终得到
u=me+mx¨1d+mk1(x˙1d−x2)+αx13+mk2δ 11◯
检验
将 8 式带入 4 式
e˙=x˙1d−(x2d−δ)=−k1e+δ
将 11 式带入 10 式
δ˙=−e−k2δ
所以得到一个线性关系的系统
[e˙δ˙]=[−k1−11−k2][eδ]
可以分析一下系数矩阵的特征值
λ1+λ2=−k1−k2<0λ1λ2=k1k2+1>0↓k1,k2<0
由于平衡点在零点,而且特征值均小于 0 ,是一个渐近稳定的系统