状态空间
对于一个系统的状态空间方程,可以使用 Laplace 变换来得到系统的运行状态方程
状态空间方程——一个包含输入,输出,状态变量的集合的一阶微分方程,但是对于高阶的系统,可以选择合适的状态量来消除高阶的系数
根据下式求出的状态空间方程中,对于矩阵 A 的特征值是决定系统极点的位置,可能会决定系统的稳定性
状态空间方程的解
对于一个状态空间方程
{x˙(t)=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t)
对上述第一个式子求解,可以将状态空间方程的解写作如下的形式,解分为两个部分,第一项为零输入响应,第二项为零状态响应。对于零输入响应,当输入 u(t)=0 时,系统的状态仅由初始状态 X(t0) 驱动,其中 eA(t−t0) 是矩阵指数。对于零状态响应,当初始状态 x(t0)=0 时,系统仅由输入 u(t) 驱动
X(t)=eA(t−t0)X(t0)+∫t0teA(t−τ)Bu(τ)dτ
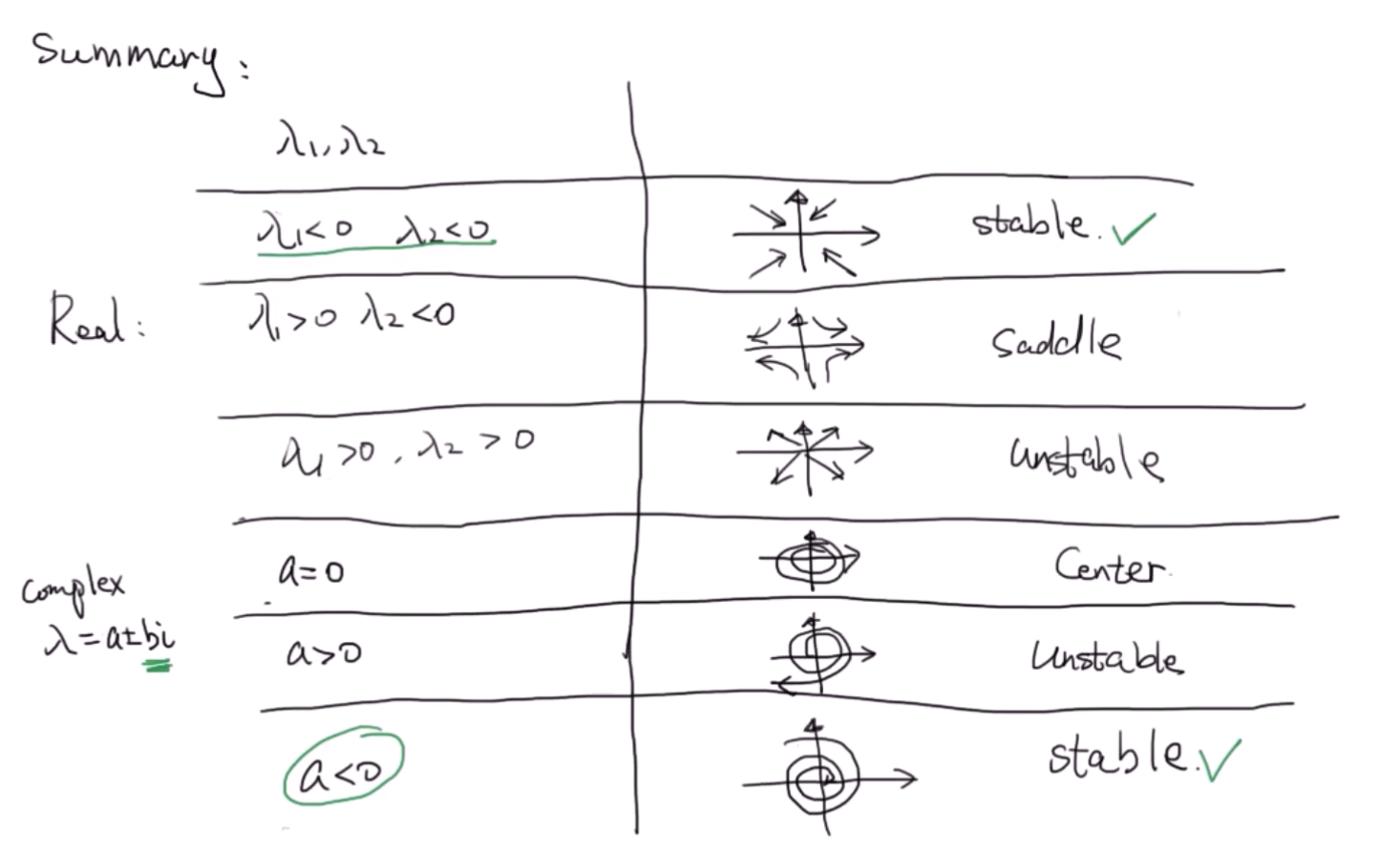
另外 eA(t−t0) 是状态转移矩阵,表示系统状态转移变化的规律,是一个实时变化的矩阵,A 矩阵对其有着重要的作用,当 A 的特征值小于 0 时, X(t) 是不断趋近于 0 的,是系统稳定性分析的一个重要方式,但是 A 矩阵的特征值中含有虚数就表示该系统是有震荡的(根据欧拉公式,引入虚数相当于是引入了 sint 和 cost,实际上是引入了震荡),要保证系统稳定,一定要保证特征值的实部小于零。如下图中分析,其中 λ1,λ2 是矩阵 A 的特征值,矩阵 A 的特征值决定了系统的稳定性
第二项是一个卷积,表示输入与输出之间的动态变化的关系
传递函数转状态空间方程
一阶系统
假设传递函数为
G(s)=U(s)Y(s)=b0s+b1a0
可以写作
Y(s)(b0s+b1)=a0U(s)
即
b0y˙+b1y=a0u
则可设
x1=y
则有
x1˙=−b0b1x1+b0a0uy=x1
得到状态方程
A=−b0b1B=b0a0C=1
二阶系统
设传递函数为
G(s)=U(s)Y(s)=b0s2+b1s+b2a0s+a1
写作
Y(s)(b0s2+b1s+b2)=(a0s+a1)U(s)
b0y¨+b1y˙+b2y=a0x˙+a1x
令
b0y1¨+b1y1˙+b2y1=uy=a0x1˙+a1x1
{x1=y1x2=y1˙
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧[x1˙x2˙]=[0−b0b21−b0b1][x1x2]+[0b01]uy=[a1a0][x1x2]
则
A=[0−b0b21−b0b1]B=[0b01]C=[a1a0]
高阶系统
G(s)=X(s)Y(s)=∑i=0Nbisi∑i=0N−1aisi
则
{X˙=AX+BUY=CX
其中
A=⎣⎢⎢⎢⎢⎢⎡000−bNb0100−bNb1010−bNb2001−bNbN−1⎦⎥⎥⎥⎥⎥⎤B=⎣⎢⎢⎢⎡00bN1⎦⎥⎥⎥⎤C=[a0a1a2aN−1]
状态空间方程转传递函数
对于一个状态空间方程
{X˙=AX+BUY=CX+Du
对方程两侧进行 laplace 变换,得
L(X˙)=L(AX+Bu)sX(s)=AX(s)+Bu(s)(sI−A)X(s)=Bu(s)
其中 I 是单位对角阵,所以可以得出
X(s)=(SI−A)−1Bu(s)
对另一个式子进行 laplace 变换得到
L(Y)=L(CX+Du)Y(s)=CX(s)+Du(s)
带入得
Y(s)=(C(SI−A)−1B+D)u(s)
所以得到传递函数
G(s)=C(sI−A)−1B+D
连续系统离散化
对于传递函数
x˙=Ax+Bu
该系统进行离散化之后可以得到
x(k+1)=Ax(k)+Bu(k)
其中
A=eATB=∫
对 eAT 进行泰勒级数展开,得到
eAT=I+AT+2!1A2T2+⋯
一般来说可以只取前三项,精度就已经足够高了
