前言
李雅普诺夫的不变性原理(LaSalle’s Invariance Principle,也称为李雅普诺夫-拉塞尔不变性原理)是动力系统和控制理论中用于分析系统长期行为的重要工具。它是对经典李雅普诺夫稳定性理论的扩展,尤其在处理非线性系统时非常有用。
示例
对于一个简单的倒立摆
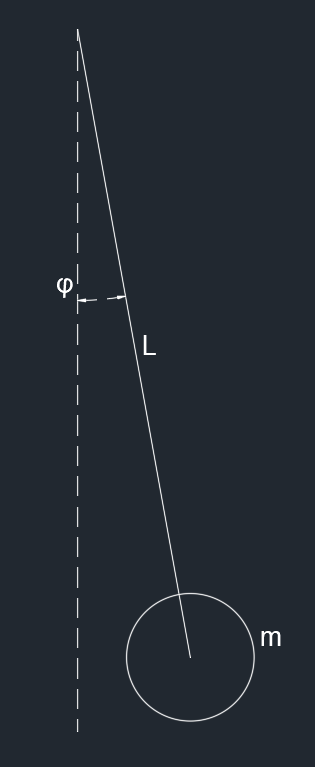
可以求出系统状态空间方程是
Lϕ¨+gsinϕ=0
设
x=[x1x2]x1=ϕx2=ϕ˙
求导之后可以得到
x˙1=x2x˙2=−Lgsinx1
寻找李雅普诺夫函数,可以使用能量方程来求解
E=K+P=21mv2+mgh=21m(Lϕ˙)2+mgL(1−cosϕ)
其中 K 是动能, P 是势能,所以可以得到李雅普诺夫函数
V(x)=21m(Lx2)2+mgL(1−cosx1)
开始分析,看得出来
V(0)=0
并且,对于任意 x1,x2,可以得到
V(x)>0
是满足正定条件的,对上述公式求导得到
V˙=▽Vf(x)=[∂x1∂V∂x2∂V][f1f2]=[mgLsinx1mL2x2][x2−Lgsinx1]=0
所以满足半负定
V˙=0≤0
所以这个系统稳定,并且 V˙=0 表明这个系统能量不变
当引入阻力之后,可以得到
mLϕ¨=−mgsinϕ˙−kLϕ˙V(x)=21m(Lx2)2+mgL(1−cosx1)V˙(x)=−kL2x22
在这里出现一个很离谱的情况,也就是 V˙(x) 在 [x10] 处总是为 0 的,这导致该函数并不是一个负定的,而是一个半负定系统。
这个系统是一个稳定系统,不是一个渐进稳定系统
动机
在上述的例子中
mLϕ¨=−mgsinϕ˙−kLϕ˙V(x)=21m(Lx2)2+mgL(1−cosx1)V˙(x)=−kL2x22
所以可以得到
V(0)=0 : PDV(x)>0V˙≤0 : NSD
系统是一个稳定系统,但不是一个渐进稳定系统,根据物理学,这个系统最终会停下来,但是数学上并没有证明,所以引入不变性原理,用来扩大李雅普诺夫的判定
不变性原理
核心思想
不变性原理通过结合李雅普诺夫函数和系统动态特性,确定系统状态最终会收敛到某个特定的集合,不仅仅是稳定的平衡点
即对于一个自治的系统
x˙=f(x)
其中 f 是局部利普希茨连续的,则假设存在一个李雅普诺夫函数 V(x) 满足
- 正定性,即 V(x)≥0 ,且仅当 x=0 时 $$V(x)=0$
- 非增性:沿系统的轨迹中有 V˙(x)≤0
定义集合
S={x∣V˙(x)=0}
并且设 M 为 S 内的最大不变集,则所有有界的系统轨迹最终都会收敛到 M 。不变集即系统状态一旦进入到该集合内,将永远停留在其中
结论
- V(x):PD
- V˙(x):NSD
- 当且仅当 X=0 时, V˙=0
满足系统在平衡点渐进稳定
例子
对于上述的例子,已知 V(x):PD,V˙(x):NSD
所以可以令 V˙=0,此时 x2=0。
当 V˙ 恒为 0 时, x2 恒为 0,也就是 x˙2 恒为 0
由于
x˙2=−Lgsinx1
所以 x1 恒为 0,也就证明了只有当 X=0 时, V˙=0 ,也就是系统是渐进稳定的

