对于一个不可观测的系统的控制,就需要用到设计观测器和控制器结合
对于一个系统
X˙=AX+Buy=CX+Du
观测器
根据之前的观测器设计,可以得到
ex˙=(A−LC)exex=X−X^L=[l1l2]
需要 A−LC 的特征值小于 0 ,才能使得该误差值逐渐趋近于 0
控制器
其中需要设计控制器为
u=−KX^
带入到系统状态方程中可以得到
X˙=AX−BK(X−ex)=(A−BK)X+BKex
与观测器中的式子合并可以得到
[ex˙x˙]=[A−LCBK0A−BK][exx]=M[exx]
这里就看出来了,M 矩阵的特征值得实部必须小于 0 ,实际上该矩阵的特征值就是 A−LC 和 A−BK 的特征值
最后就是要求观测器的 A−LC 特征值与控制器的 A−BK 的特征值小于 0,它们两个就分离开了
有一个要求就是观测器的收敛速度一定要大于控制器的收敛速度,以此来保证观测到的数据都是较为准确的
一般来说极点位置 s=−a 越小系统收敛越快
一个小栗子
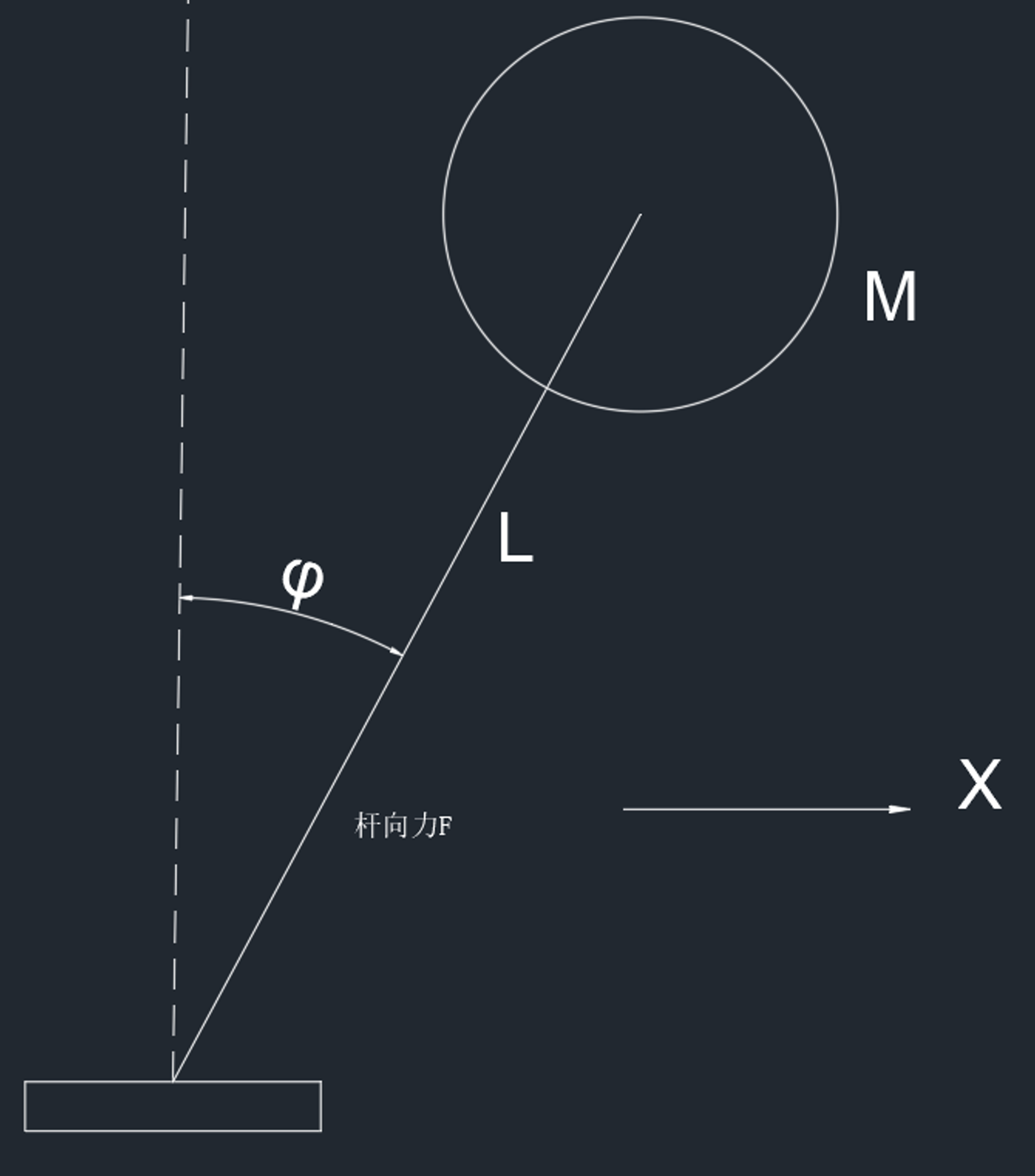
建立系统状态空间方程,令
X=[x1x2]x1=ϕx2=ϕ˙(不可测)u=L1x¨block
则从上式可以得到状态空间方程
X˙=[0Lg10]X+[0−1]uy=[10]X+[0]u
可以得到
A−LC=[0Lg10]−[l1l2][10]=[−l1Lg−l210]
可以假设
g=10 N/m2L=1 m
带入后得到
A−LC=[−l110−l210]
求其特征方程为
∣λI−(A−LC)∣=0⇓λ2+l1λ+l2−10=0
所以,令该特征方程的两个根都为 -1 ,可以得到
l1=2l2=11
所以带入到估计值的方程中可以得到
X^˙=(A−LC)X^+(B−LD)u+Ly⇓X^˙=[−2−110]X^+[0−1]u+[211]y
对于线性控制器来说,输入 u 满足
u=−KX^
[ex˙x˙]=[A−LCBK0A−BK][exx]=M[exx]
特征方程为
λ2−k2λ−10−k1=0
令 A−BK 的特征方程的两个根都为 -1,可以得到
k1=−11k2=−2
所以得到
u=[112]X^