介绍
炫彩灯珠内置 IC,可以显示 256×256×256 种颜色,仅凭一根信号线即可实现多种多样的效果
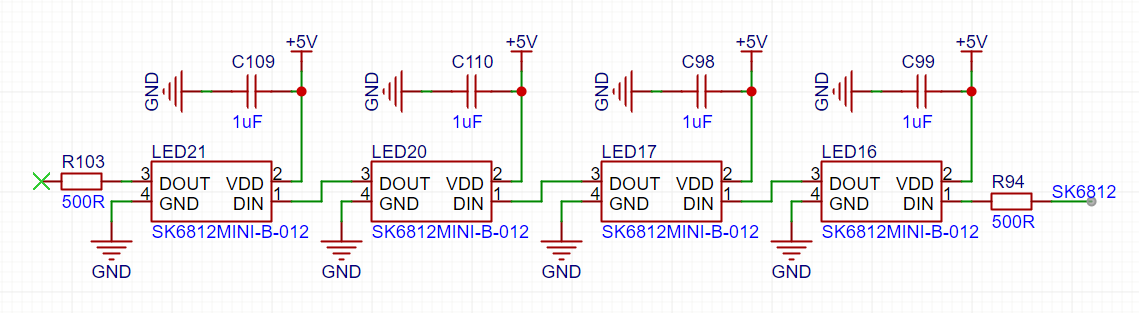
硬件电路
根据 SK6812 的电气参数和手册上的典型应用电路来设计其硬件电路
| 参数 |
符号 |
范围 |
单位 |
| 电压 |
VDD |
+3.7~+5.5 |
V |
| 逻辑输入电压 |
VI |
-0.5~VDD+0.5 |
V |
| 工作温度 |
Topt |
-40~+85 |
℃ |
| 储存温度 |
Tstg |
-40~+85 |
℃ |
| ESD耐压(设备模式) |
VESD |
200 |
V |
| ESD耐压(人体模式) |
VESD |
2K |
V |
控制方式
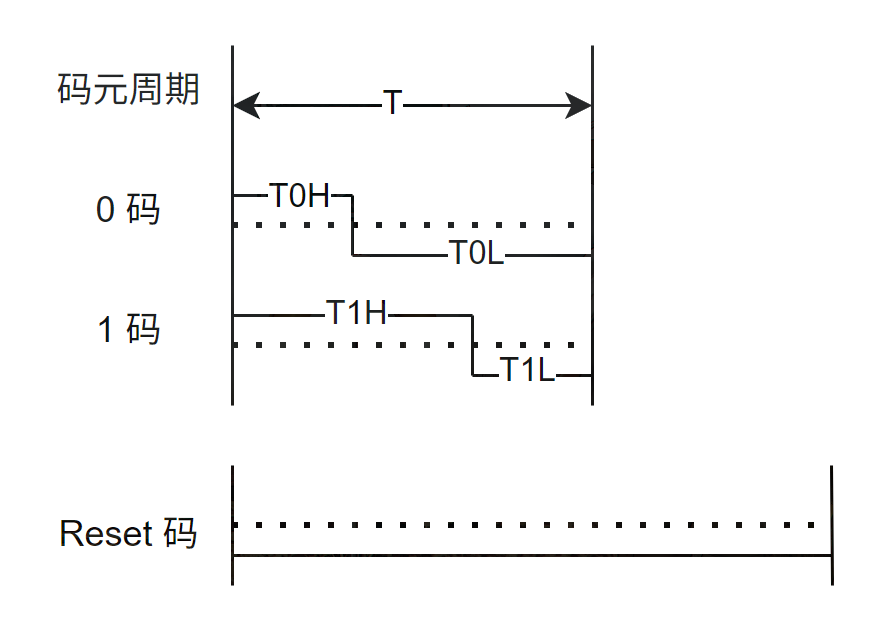
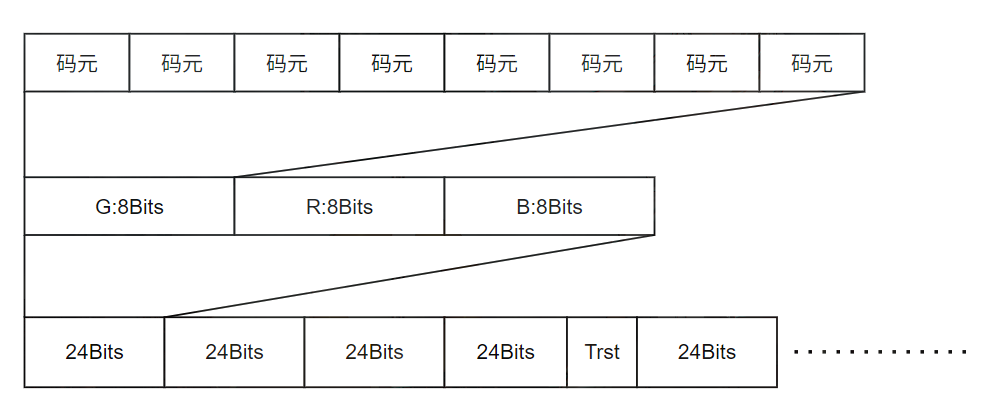
SK6812 的数据传输方式比起一般的外设来说,有点特别,每个位都是一个码元,然后通过控制码元的高低电平时间来控制该位的高低
| 时序表名称 |
min |
typic |
max |
单位 |
| T |
1.20 |
- |
- |
us |
| T0H |
0.2 |
0.3 |
0.4 |
us |
| T0L |
0.8 |
- |
- |
us |
| T1H |
0.6 |
0.67 |
1.0 |
us |
| T1L |
0.2 |
- |
- |
us |
| Trst |
≥80 |
- |
- |
us |
协议中每个码元都必须有低电平,每个码元起始为高电平,高电平时间宽度决定了该码元是 0 码还是 1 码,每个码元周期最小为 1.2us,具体的传输方式如下图所示
GPIO 翻转
GPIO 可以通过计算系统主频来计算出单条指令的时间,从而实现纳秒级硬延时。例如对于 AT32F403,设置单片机运行主频为 240MHz,所以它单条指令所需要的时间为 240M1=4.167ns 。根据上述分析,设置码元时间为 1.2us ,则 0 码的高电平持续时间为 0.3us ,低电平持续时间为 0.9us ,而 1 码的高电平持续时间为 0.6us ,低电平持续时间为 0.6us
一般可以利用 __nop() 指令,单条 __nop() 指令所需要的时间是 4.167ns ,所以可以利用 72 条指令来模拟延时 0.3us ,对应的代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
|
uint8_t color_data_list[4][] = {
0x00, 0x00, 0x00,
0x00, 0x00, 0x00,
0x00, 0x00, 0x00,
0x00, 0x00, 0x00
};
void delay_30us() {
__nop();
...
__nop();
}
void sk_init() {
wk_dma_channel_config(DMA1_CHANNEL1, (uint32_t) &SPI2->dt, (uint32_t) color_data_list, 96);
}
static void set_color(uint8_t r, uint8_t g, uint8_t b) {
color_data_list[0][0] = color_data_list[1][0] = color_data_list[2][0] = color_data_list[3][0] = g;
color_data_list[0][1] = color_data_list[1][1] = color_data_list[2][1] = color_data_list[3][1] = r;
color_data_list[0][2] = color_data_list[1][2] = color_data_list[2][2] = color_data_list[3][2] = b;
}
static void set_high_level() {
gpio_bits_set(GPIOB, GPIO_PINS_13);
delay_30us();
delay_30us();
gpio_bits_reset(GPIOB, GPIO_PINS_13);
delay_30us();
delay_30us();
}
static void set_low_level() {
gpio_bits_set(GPIOB, GPIO_PINS_13);
delay_30us();
gpio_bits_reset(GPIOB, GPIO_PINS_13);
delay_30us();
delay_30us();
delay_30us();
}
static void send_color() {
for(int i = 0; i < 12; ++i)
for(int j = 7; j >= 0; --j) {
if(color_data_list[i] & (0x01 << j)) set_high_level();
else set_low_level();
}
}
|
PWM+DMA
根据上述中每个码元的时间为 1.2us ,因此可以设置 PWM 的周期为 1.25us 即频率为 800KHz,通知通过控制重装载值即可控制高低电平的时间,从而实现码元输出。由于 AT32F403 时钟的主频为 240MHz ,因此可以设置预分频值为 2 ,设置周期值为 99 即可。由于 PWM 的输出,当计数值小于比较值时,输出低电平,由于码元需要是高电平在前,所以设置 PWM 计数方式为向下计数
设置 0 码元和 1 码元的高低电平占比
- 0 码元: 0.3us 高电平, 0.95us 低电平,设置比较值为 76
- 1 码元: 0.65us 高电平, 0.6us 低电平,设置比较值为 50
另外打开该通道的 DMA,传输方向设置为从内存到外设,代码实现如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
| #define HIGH_LEVEL 76
#define LOW_LEVEL 50
uint8_t color_data_list[4][24] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
void sk_init() {
wk_dma_channel_config(DMA1_CHANNEL2, (uint32_t) &TMR3->c1dt, (uint32_t) color_data_list, 96);
}
static void set_color(uint8_t r, uint8_t g, uint8_t b) {
uint32_t grb = (g << 16) | (r << 8) | b;
uint32_t mask = 0x01 << 23;
uint8_t i;
for (i = 0; i < 24; ++i) color_data_list[0][i] = color_data_list[1][i] = color_data_list[2][i] = color_data_list[3][i] = ((grb & (mask >> i)) ? HIGH_LEVEL : LOW_LEVEL);
}
static void send_color() {
dma_channel_enable(DMA1_CHANNEL2, TRUE);
while (dma_flag_get(DMA1_FDT2_FLAG) == RESET);
dma_flag_clear(DMA1_FDT2_FLAG);
dma_channel_enable(DMA1_CHANNEL2, FALSE);
}
|
SPI+DMA
由上述所述,可知每个码元的持续时间大概在 1.2∼∞us 之间, 为了传输的效率,此处要选择尽量小的周期。使用 SPI 控制时,可以通过发送 8 bits 数据来控制,可以利用单个 8 bit 数据所形成的波形来分别表示 0 码和 1 码
- 0 码:前 2 个比特为高电平,后 6 个比特为低电平,因此发送的数据应当是
0b11000000
- 1 码:前 5 个比特为高电平,后 3 个比特为低电平,因此发送的数据为
0b11111000
假设 SPI 的频率为 xMHz (也就是发送一个比特位的频率),则可以调整 x 的大小,使得 SPI 能在 1.2us∼∞ 之间发送一个字节,计算可得 x≤6.67MHz ,所以在设置 SPI 时就不能设置的主频过高,而且需要注意设置 SPI 的帧位个数为 8 位,且高位先传输(MSB First)。对应的代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
| #define HIGH_LEVEL 0xf8
#define LOW_LEVEL 0xc0
uint8_t color_data_list[4][] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
void sk_init() {
wk_dma_channel_config(DMA1_CHANNEL1, (uint32_t) &SPI2->dt, (uint32_t) color_data_list, 96);
}
static void set_color(uint8_t r, uint8_t g, uint8_t b) {
uint32_t grb = (g << 16) | (r << 8) | b;
uint32_t mask = 0x01 << 23;
uint8_t i;
for (i = 0; i < 24; ++i) color_data_list[0][i] = color_data_list[1][i] = color_data_list[2][i] = color_data_list[3][i] = (grb & (mask >> i)) ? HIGH_LEVEL : LOW_LEVEL;
}
static void send_color() {
spi_i2s_dma_transmitter_enable(SPI2, TRUE);
dma_channel_enable(DMA1_CHANNEL1, TRUE);
while (dma_flag_get(DMA1_FDT1_FLAG) == RESET);
dma_flag_clear(DMA1_FDT1_FLAG);
dma_channel_enable(DMA1_CHANNEL1, FALSE);
spi_i2s_dma_transmitter_enable(SPI2, FALSE);
}
|
进阶控制方式——呼吸灯
SK6812 可以通过控制 RGB 三色值来控制彩灯的颜色,当然还可以通过控制颜色空间 HSV,再转换为 RGB 来控制颜色空间
RGB 转 HSV
max=max(r,g,b)min=min(r,g,b)h=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧0∘60∘×max−ming−b+0∘60∘×max−ming−b+360∘60∘×max−minb−r+120∘60∘×max−minr−g+240∘max=minmax=rg≥bmax=rg<bmax=gmax=bs=⎩⎪⎨⎪⎧0∘maxmax−minmax=0v=max
代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
| static void rgb_to_hsv(float* h, float* s, float* v, uint8_t r, uint8_t g, uint8_t b) {
uint8_t max = (r > g) ? (r > b ? r : b) : (g > b ? g : b);
uint8_t min = (r < g) ? (r < b ? r : b) : (g < b ? g : b);
float tmp = max - min;
*v = max;
if (max == 0) *s = 0;
else *s = tmp / max;
if (max == min) *h = 0;
else if (max == r && g >= b) *h = 60.f * (g - b) / tmp;
else if (max == r && g < b) *h = 60.f * (g - b) / tmp + 360;
else if (max == g) *h = 60.f * (b - r) / tmp + 120;
else if (max == b) *h = 60.f * (r - g) / tmp + 240;
}
|
HSV 转 RGB
c=v×sx=c×(1−∣mod(60∘h,2)−1∣)m=v−c(r′,g′,b′)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧(c,x,0)(x,c,0)(0,c,0)(0,x,c)(x,0,c)(c,0,x)0∘≤h<60∘60∘≤h<120∘120∘≤h<180∘180∘≤h<240∘240∘≤h<300∘300∘≤h<360∘(r,g,b)=((r′+m)×255),(g′+m)×255),(b′+m)×255))
代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| static void hsv_to_rgb(float h, float s, float v, uint8_t* r, uint8_t* g, uint8_t* b) {
float c, tmp, x, m, r_, g_, b_;
c = v * s;
tmp = h / 60 - 1;
x = c * (1 - (int) tmp % 2);
m = v - c;
if (h < 60) {
r_ = c;
g_ = x;
b_ = 0;
} else if (h < 120) {
r_ = x;
g_ = c;
b_ = 0;
} else if (h < 180) {
r_ = 0;
g_ = c;
b_ = x;
} else if (h < 240) {
r_ = 0;
g_ = x;
b_ = c;
} else if (h < 300) {
r_ = x;
g_ = 0;
b_ = c;
} else {
r_ = c;
g_ = 0;
b_ = x;
}
*r = (r_ + m) * 255;
*g = (g_ + m) * 255;
*b = (b_ + m) * 255;
}
|
一个示例代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| void func() {
float h, s, v;
uint8_t r, g, b;
h = 0;
for (;;) {
h = fmod(h + 2, 360);
v = 0;
while (v < 1) {
v += 0.01f;
hsv_to_rgb(h, s, v, &r, &g, &b);
set_color(r, g, b);
send_color();
vTaskDelay(1);
}
while (v > 0) {
v -= 0.01f;
hsv_to_rgb(h, s, v, &r, &g, &b);
set_color(r, g, b);
send_color();
vTaskDelay(1);
}
}
}
|
